I am currently looking for PhD students - email me if you are interested. EPSRC studentships are available for home students, and the university has a range of scholarships available for international candidates.
Soft mechanics.
Soft solids are found throughout biology and engineering - we eat them, sleep on them and are made out of them. Familiar examples include rubber, jelly, sponge, muscle and skin. I lead the soft mechanics group, which is focused on the mechanics of these materials: how do they deform, contort and fail? The hallmark of such soft solids is that they can deform substantially, and in response to slight and diverse stimuli. Their solid mechanics is correspondingly rich and dramatic, with many examples of spectacular shape changing phenomena for us to understand, and ultimately use in shape-shifting devices. The text below is taken from the group website - you might like to check there to see if there is a more up-to-date version!
Our research is all rooted in theory, particularly continuum mechanics, geometry and condensed matter physics. However, we also find that good theory must be done in close dialogue with experiment. Accordingly, we collaborate widely with leading experimentalists, and are now building our own experimental capacity within the group.
Much of our research divides into three broad categories, which are outlined below.
Liquid crystal elastomers
Liquid crystal elastomers (LCEs) are remarkable new phase of matter that combines the mobile orientational order of liquid crystals with the extreme stretchiness of rubber. On a molecular level, they are cross-linked rubbery networks of polymers in which the underlying monomer units are rigid liquid-crystaline rods. These rods form an aligned nematic phase within the rubber, but, on heating the order is destroyed (mirroring the conventional nematic-isotropic phase transition), and the elastomer contracts dramatically. Furthermore, the shape change is fully reversible on cooling, and can be triggered by other stimuli, including light.
Actuation of an LCE at a molecular and continuum level. Video courtesy of Morgan Barnes, Verduzco Lab.
Furthermore, if an LCE sheet is prepared with a spatially varying orientation direction, it will contract in a patterned way on stimulation, giving a complex programmed shape change that is reminiscent of a developing organism. A computational and experimental example are shown below.
Actuation of an m=2 topological defect pattern.
LCE sheet that actuates to make a face. Video from Barnes and Verduzco, Soft Matter, 2019.
Our group is interesting in designing and harnessing such sophisticated programmed shape changes to do interesting mechanics and ultimately make useful soft machines.
Elastic instabilities and morphogenesis
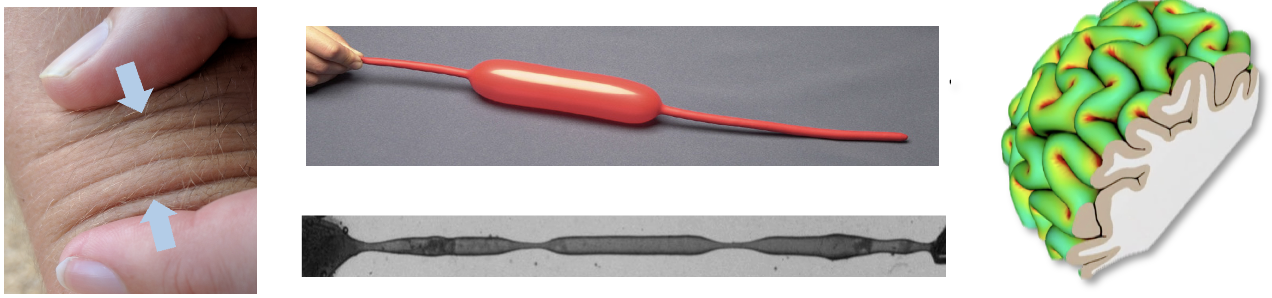
Even simple soft solids, such as conventional rubber, can deform in dramatic and unexpected ways. For example, if you if you start to blow up a cylindrical party balloon you will see a propagating bulge, and if you squeeze the skin on your arm you will see the formation of wrinkles.
Wrinkle/sulcus instability in squeezed skin. Aneurysm instability in a party balloon. Surface-tension driven beading in a gel cylinder (Mora et al, PRL 2010). Gyrification instability in a simulated brain.
These phenomena are examples of elastic instabilities, and are similar in spirit to the classic Euler buckling instability in columns under compression. However, such instabilities are much more interesting in highly deformable soft solids, both because there are many more examples, and because soft solids can survive such instabilities, allowing them to be functional rather than simply failure modes. For example, evolution has harnessed a compressive wrinkle-like instability to sculpt the gyri and sulci of the human brain during development!
Our group has uncovered and explained several new instabilities in soft solids, including the beading instability shown below that occurs when a hollow tube through a gel is inflated.
Geometric softness: chains, plates, shells
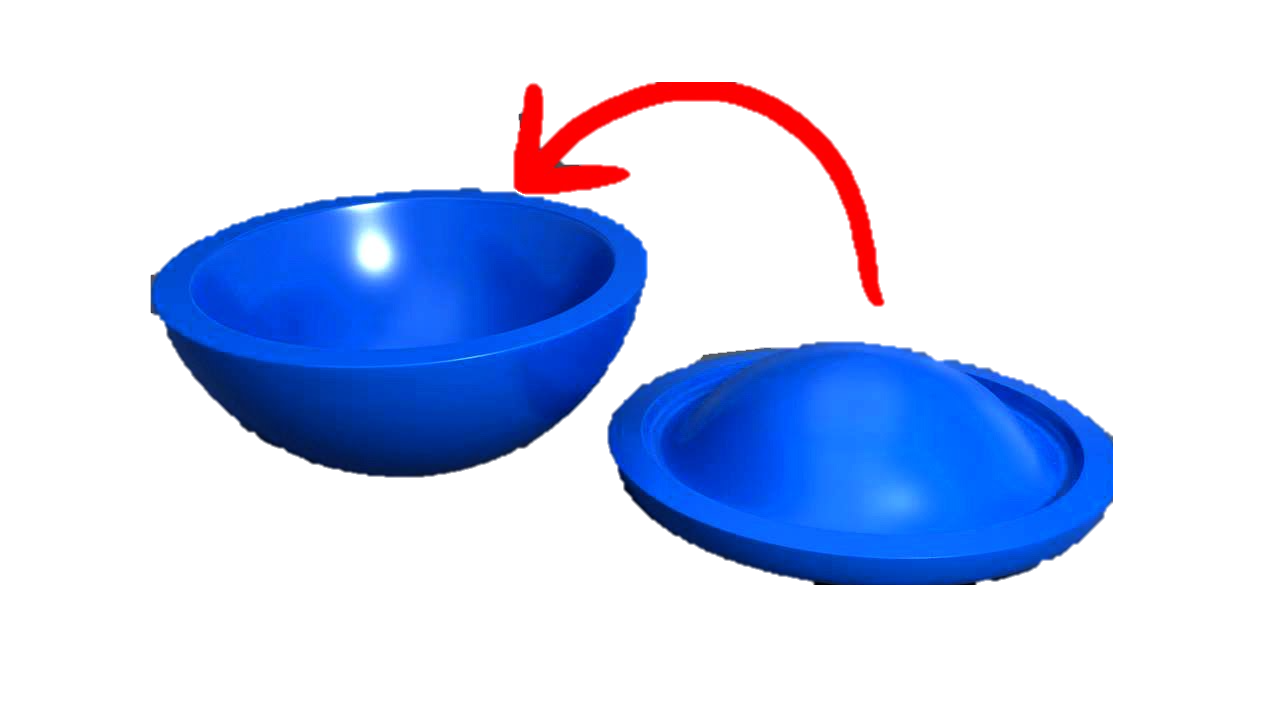
Solid objects with a high aspect ratio, such as filaments, plates and shells, are often capable of large shape changes even if the underlying material is stiff, because they can deform substantially via loa-strain bends. Consider, for example, the crumpling of a piece of paper, or the grasping and coiling of a plant tendril. We are also interested in the mechanics of such geometrically soft systems, including actuating LCE fibers and the buckling and snapping of active shells such as the rubber popper toy shown below.
A particular success in geometrically soft mechanics was our explanation of the youtube phenomena of the chain fountain!
Funding
We are grateful to our funders, who include UK Research and Innovation (UKRI), the UK’s Engineering and Physical Sciences Research Council (EPSRC) and the European Research Council (ERC).